マイクロネットのEtherCAT®製品は、以下のEtherCAT®スレーブモジュールと接続を確認しています。
※別途、スレーブ接続動作確認サービスを承っております。弊社営業部までお気軽にお問い合わせください。

速度応答周波数2300Hz。
通信速度100Mbps。
リアルタイムオートチューニング、各種振動抑制フィルタを搭載。
業界最小のEtherCAT®対応アンプ。
セットアップ支援ソフトPANATERMに対応。
充実したEtherCAT®アプリケーション(7種類の制御モード、32種類の原点復帰モード、同期(2種)と非同期モード)
サンプルコードを公開中です。

CiA402準拠モーション制御スレーブL7Nシリーズ製品は、Cyclic synchronous position mode、Profile position modeに対応。
RSI-ECAT-MasterでのCyclic synchronous position mode動作を確認しました。
サンプルコードを公開中です。

山洋電気のEtherCAT対応の、サーボモータ、ステッピングモーターに対しての、RSI-ECAT-Masterでの評価を実施しました。
半導体製造装置,チップマウンタ,ロボット,工作機械など,高精度の駆動が求められる装置に最適です。
サンプルコードを公開中です。
評価レポート(PDF)
①SANMOTION R ACサーボアンプ R2EA04003FXP00
②SANMOTION R ACサーボアンプ RS3A03A2HA4
③SANMOTION クローズドループステッピングドライバ PB4D003E440
EtherCAT®インターフェース通信 4軸2相ユニポーラ定電流ステッピングモータードライバーです。
Drive Profile CiA402、PPモード(Profile Position mode)、HMモード(homing mode)に対応しており、モーション制御コアには日本パルスモーター製PCL6046を搭載しています。
RSI-ECAT-MasterによりProfile Positionモードでの動作確認をしました。
サンプルコードを公開中です。

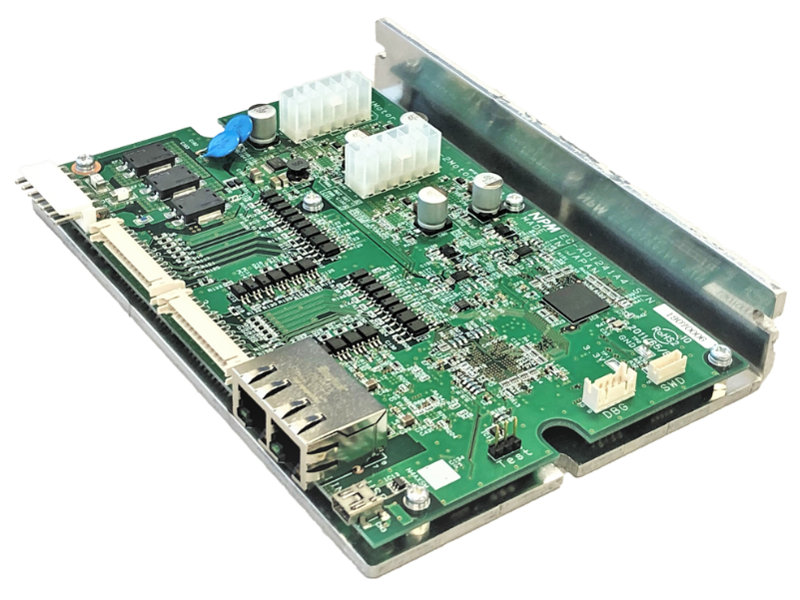
EtherCAT®インターフェース通信 クローズドループステッピングモーター(PULSERVO)用ドライバーです。
Drive Profile CiA402、CSPモード(Cyclic Synchronous Position mode)、PPモード(Profile Position mode)、HMモード(homing mode)に対応しており、モーション制御コアには日本パルスモーター製PCL6115を搭載しています。
RSI-ECAT-MasterによりCPSモード/PPモードでの動作確認をしました。
評価レポートNPM_EtherCAT_PSD2-EC-28L-D.pdf
サンプルコードSample(PSD2-EC-28L-D).zip

高速・高機能・円弧補間・直線補間・位置決めまで、PCからのコマンドにより、スレーブ側で位置・速度情報の生成・処理が可能な最大4軸のモーターを制御できるEtherCAT®スレーブです。
評価レポートHIVERTEC_HES-C400.pdf

業界標準e-CONに準拠したコネクタを採用したデジタル入出力ユニットです。
| 名称 | 形式 | 評価レポート |
|---|---|---|
| デジタル16点入力 ユニット (NPN仕様) |
ECEPF00-1 | ALGOSYSTEM_DI16.pdf |
| デジタル16点出力 ユニット (NPN仕様) |
ECEP0F0-1 | ALGOSYSTEM_DO16.pdf |
| デジタル32点入力 ユニット (NPN仕様) |
ECEPW00-1 | ALGOSYSTEM_DI32.pdf |
| デジタル32点出力 ユニット (NPN仕様) |
ECEP0W0-1 | ALGOSYSTEM_DO32.pdf |
| デジタル 16点入力/16点出力 ユニット (NPN仕様) |
ECEPFF0-1 | ALGOSYSTEM_DIO1616.pdf |
8点/8点デジタル入出力 スレーブ。
脱着可能なコネクタ機能を持った小型端子台を採用した超小型デジタル入出力ユニットです。
ねじ式端子台タイプの高速デジタルI/Oターミナルです。
| 名称 | 形式 | 評価レポート |
|---|---|---|
| 16点入力 | GX-ID1611 | Omron ECAT(GX-ID1611).pdf |
| 8点入力/8点出力 | GX-MD1611 | Omron ECAT(GX-MD1611).pdf |
| 16点出力 | GX-OD1611 | Omron ECAT(GX-OD1611).pdf |

8点/8点デジタル入出力スレーブです。

4chのアナログ入力ユニットとアナログ出力ユニットです。
| 名称 | 形式 | 評価レポート |
|---|---|---|
| 4chアナログ入力 ユニット |
ECEA402 | ALGOSYSTEM_AD4.pdf |
| 4chアナログ出力 ユニット |
ECEA042 | ALGOSYSTEM_DA4.pdf |
4chのアナログ入力ユニットと2chのアナログ出力ユニットです。
| 名称 | 形式 | 評価レポート |
|---|---|---|
| 4chアナログ入力 ユニット |
GX-AD0471 | Omron ECAT(GX-AD0471).pdf |
| 2chアナログ出力 ユニット |
GX-DA0271 | Omron ECAT(GX-DA0271).pdf |
8ch 入力/ 2ch 出力 アナログ入出力 スレーブです。

Phoenix Contact社製EtherCAT®バスカプラ製品は、システムの要件に合わせて自由にI/Oモジュールを接続できるようになっています。
I/Oの設置箇所が分散されている場合にも、EtherCAT®バスカプラを多段接続することで延伸することができます。

バスカプラはEtherCAT®ネットワークでの使用を目的としており、Inline I/Oシステムへのリンクとなっています。
最大63点のInline機器をバスカプラに接続できます。

Inline ECO, デジタル入力端子台, デジタル入力: 8, 24 V DC

Inline ECO, デジタル出力端子台, デジタル出力: 8, 24 V DC

Beckhoff社製EtherCAT®カプラ製品は、システムの要件に合わせて自由にI/Oモジュールを接続できるようになっています。
I/Oの設置箇所が分散されている場合にも、EtherCAT®カプラを多段接続することで延伸することができます。

Beckhoff社のディジタルI/Oモジュールは、2-channel、4-channel、8-channelのバリエーションと、VDC~230VACまでの幅広いレンジに合わせた製品をサポートします。
選択可能なバリエーション
→ 製品情報
Beckhoff社のディジタルI/Oモジュールは、1-channel~16-channelのバリエーションと、5VDC~230VACまでの幅広いレンジに合わせた製品をサポートします。
選択可能なバリエーション
→ 製品情報
選択可能なバリエーション
→ 製品情報
選択可能なバリエーション
→ 製品情報
EL90xxシリーズはシステムターミネータとしてカプラ終端に取り付けます。
選択可能なバリエーション
→ 製品情報

WAGO I/Oシステムモジュールフィールドバスカプラ。
WAGO社製EtherCAT®カプラ製品は、システムの要件に合わせて自由にI/Oモジュールを接続できるようになっています。
I/Oの設置箇所が分散されている場合にも、EtherCAT®カプラを多段接続することで延伸することができます。
750-354単体での使用は出来ません。必ず1つ以上のI/Oモジュールと終端モジュール(750-600)を付ける必要があります。
最小構成例:
750-354 EtherCAT®カプラ
750-501 Digital Out 2ch
750-600 終端モジュール
| I/O | オブジェクト名称 | TYPE | BitSize | PI Offset | 備考 |
|---|---|---|---|---|---|
| 入力 (IN) |
K-Bus Cycle Overrun Flag | BOOL | 1 | 0x00 | - |
| Input Process Data Hold Ack. | BOOL | 1 | 0x01 | - | |
| Output Process Data Hold Ack. | BOOL | 1 | 0x02 | - | |
| Output Process Data Clear Ack. | BOOL | 1 | 0x03 | - | |
| New Message Available | BOOL | 1 | 0x0f | - | |
| Diagnostics Status Word | UINT | 16 | 0x10 | - | |
| 追加モジュール(IN) 項目 |
- | - | 0x20 ~ | 追加モジュール によって 追加されます |
|
| 出力 (OUT) |
K-Bus Cycle Overrun Flag Disable | BOOL | 1 | 0x00 | - |
| Input Process Data Hold Request | BOOL | 1 | 0x01 | - | |
| Output Process Data Hold Request | BOOL | 1 | 0x02 | - | |
| Output Process Data Clear Request | BOOL | 1 | 0x03 | - | |
| Diagnostics Control Word | UINT | 16 | 0x10 | - | |
| 追加モジュール(OUT) 項目 |
- | - | 0x20 ~ | 追加モジュール によって 追加されます |

WAGO 2チャンネル デジタル入力モジュール
| I/O | オブジェクト名称 | TYPE | BitSize | PI Offset | 備考 |
|---|---|---|---|---|---|
| 入力(IN) | Channel 1 Data | BOOL | 1 | モジュールによって変動 | 750-354の(IN)に追加されます |
| Channel 2 Data | BOOL | 1 | +0x01 |
WAGO 2チャンネル デジタル出力モジュール
| I/O | オブジェクト名称 | TYPE | BitSize | PI Offset | 備考 |
|---|---|---|---|---|---|
| 出力(OUT) | Channel 1 Data | BOOL | 1 | モジュールによって変動 | 750-354の(OUT)に追加されます |
| Channel 2 Data | BOOL | 1 | +0x01 |
750-354 EtherCAT® Couplerの終端を表す為に付ける必要があります。
PDOにマップされるメモリはありません。
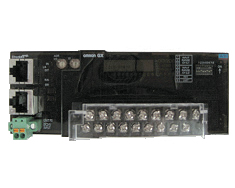
エム・システム技研社製のリモートI/Oユニット R8シリーズは、システムの要件に合わせて自由に組み合わせを変更できるようになっています。
I/Oの設置場所が分散されている場合でも、EtherCAT®電源通信ユニットを多段接続することで延伸することができます。
マイクロネットでは、DI,DO,AI,AOのユニットと接続した状態での動作検証を実施し、正常に動作することを確認しました。
| 名称 | 形式 |
|---|---|
| 電源通信ユニット | R8-NECT1 |
| デジタル入力 | DA4A |
| デジタル出力 | DC4A |
| アナログ入力 | SV4N |
| デジタル入力 | YV4N |

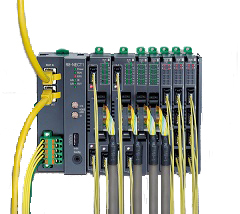
ADLINK社製のEPSスレーブシステムは、システムの要件に合わせて自由に組み合わせを変更できるようになっています。
マイクロネットでは、5スロットを有するスレーブ筐体にカプラーデバイス,DI,DO,AI,AOのユニットを接続した状態での動作検証を実施し、正常に動作することを確認しました。
| 名称 | 形式 | 備考 |
|---|---|---|
| 筐体 | EPS-9905 with EPS-6000 | 詳細 |
| カプラー入力(IN) カプラー出力(OUT) |
EPS-6000 | 詳細 |
| デジタル入力(IN) デジタル入力(OUT) |
EPS-1132 | 詳細 |
| デジタル出力(IN) デジタル出力(OUT) |
EPS-2032 | 詳細 |
| アナログ入力(IN) アナログ入力(OUT) |
EPS-3032 | 詳細 |
| アナログ出力(IN) アナログ出力(OUT) |
EPS-4008 | 詳細 |

