PCプラットフォームによる
PCプラットフォームによる
産業用ソリューションプロバイダー
産業用ソリューションプロバイダー
採用情報
お問合せ
Japanese
English
PP307
サイト内検索:
製品情報
サービス
企業案内
セミナー / 展示会
カタログ
YouTube
技術コラム
サイトマップ
ホーム
>
RT-C言語コントローラ
> 技術情報
◆ 概要
◆ 仕様
◆ コントローラ
◆ 外部入出力
◆ 技術情報
◆ FAQ
◆ 更新履歴
RT-C言語コントローラ技術情報
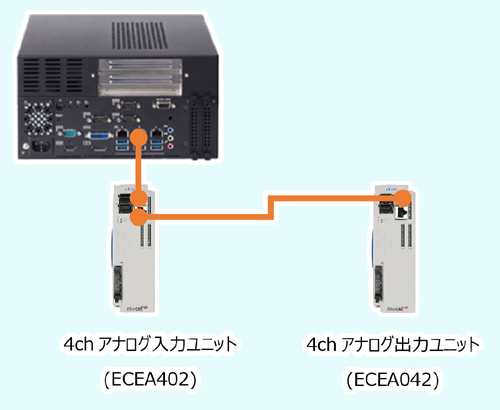
■ 1. EtherCAT®使用方法
RT-C言語コントローラでEtherCAT®を使用する準備~実行までの手順をご説明します。
詳しくは
こちら
をご覧ください
EtherCAT®を使用するには、RT-C言語コントローラにオプションのEtherCAT®が必要になります。
※RTC-U200コントローラはEtherCAT®が標準実装されています。
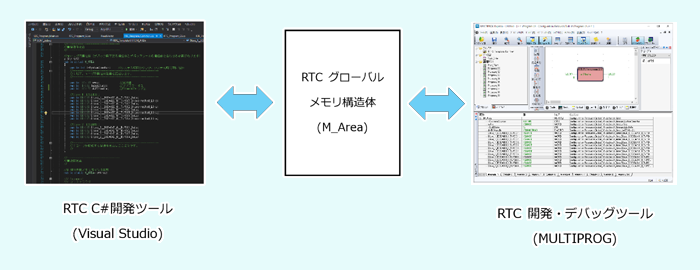
■ 2. RTC グローバルメモリを使用したデバッグ方法
RT-C言語コントローラは、RTC C#開発ツール(Visual Studio)を使用してデバッグ実行などの機能が使用出来ません。
代替となるデバッグ機能として用意されているRT-C言語コントローラユーザーズマニュアル(RTC_UsersManual.pdf)に記載されているRTC グローバルメモリ構造体(M_Area)を通してRTC 開発・デバッグツール(MULTIPROG)でC#プログラム内の変数やEtherCAT®スレーブのデータの読書を行うデバッグ方法をご説明します。
詳しくは
こちら
をご覧ください
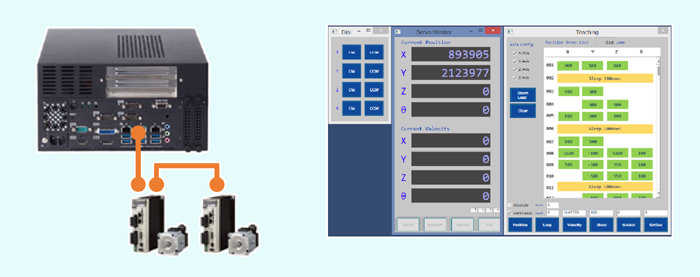
■ 3. RT-Motionのサンプルを動かす
RT-C言語コントローラでRT-Motion(モーションコントローラソフトウェア)のサンプルを使用して「準備」~「モーターを動かす」までの手順をご説明します。サンプルは最大4軸をTeaching ツールで設定した動作を実行するサンプルです。
※RT-Motionのサンプルを使用するには、RT-Motion(オプション)と EtherCAT Studio(オプション)が必要です。 詳しくは
こちら
をご覧ください
■ 4. RTC-言語コントローラ電源瞬断ソリューション
4.1 制御PC電源瞬断ソリューション (共通)
制御PC(コントローラ)の電源瞬断(停電)対策についての共通の対応方法について説明しています。
製品別の対応例と合わせて参照してください。
詳しくは「
制御PC電源瞬断ソリューション (共通)
」をご覧ください。
4.2 制御PC電源瞬断ソリューション (RTC)
RT-C言語コントローラの電源瞬断(停電)対策についての対応例について説明しています。
詳しくは「
制御PC電源瞬断ソリューション (RTC)
」をご覧ください。
■ 5. CSVファイル読込、2次元配列取扱いサンプル
このサンプルは、RT-C言語コントローラでCSVファイルから2次元のCSVデータを読み込みメモリへデータを保管します。
その保管したデータを2次元配列として参照するサンプルです。
サンプルは
こちら
からダウンロードしてください。
※ダウンロードした圧縮ファイル解凍後、はじめにReadMe.Txtをお読みください。