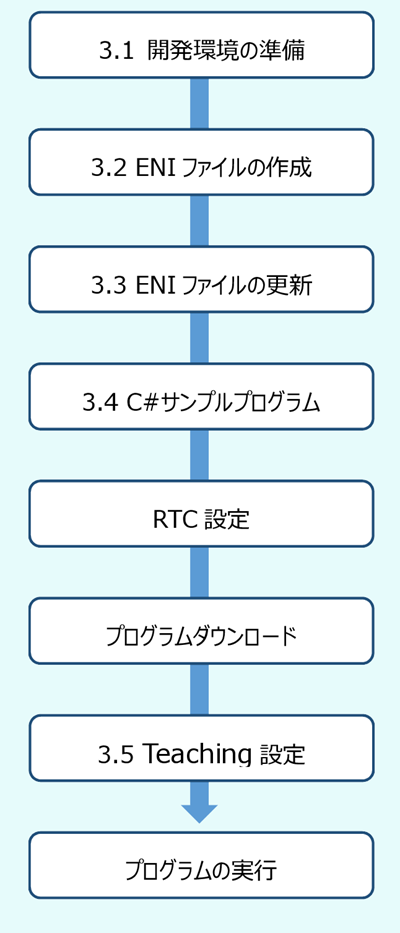
■ 3. 手順
3.1. 開発環境の準備
RT-C言語コントローラでRT-Motion(モーションコントローラソフトウェア)のサンプルを動かす為には、開発環境として下記の開発環境のインストールやライブラリの適応が必要となります。
- RTC-開発キットのインストール
- RT-Motionライブラリ追加
- EtherCAT Studio(EtherCATコンフィグレータ)インストール
3.1.1. RTC-開発キット インストール
RTC-開発キットCD-ROMに収録されております「RTC-SDK
セットアップガイド(RTC_SetupGuide.pdf)」に
したがいRTC-開発キットのインストールを行い動作確認まで行ってください。
3.1.2. RT-Motionライブラリ追加
RTC-開発キットがインストールされている環境にオプションにRT-Motionのライブラリを追加します。
RTC-開発キットCD-ROMに収録されております「新規機能の追加 ・
更新手順マニュアル(RTC_新機能追加・更新手順.pdf)」にしたがいライブラリを追加してください
RT-Motion開発用ライブラリ (DLL)
[CD-ROM]:\InstallLauncher\install_component\inplc\fwl\RtmcFwlLib\RtmcFwlLib.DLL
※DLLのバージョンは「1.1.1」です。
「3.2.2. RT-C言語 コントローラへファームウェアパックを適用する」は読み飛ばしてください。
※RT-C言語コントローラ購入時にRT-Motionのオプションを付けると、コントローラにはRT-Motionのファームウェアパックが適応された状態で出荷されます。
3.1.3. EtherCAT Studioインストール
EtherCAT Studio CD-ROMに収録されております「Readme.txt」に記載されているインストール方法にしたがいインストール方法のインストールを行ってください。
3.2. ENI I(EtherCAT Network Information)ファイルの作成
ENI(EtherCAT Network Information)ファイルの作成はEtherCAT Studio(オプション)が必要となります。
3.2.1. EtherCAT Studio(コンフィグレータソフトウェア)とは
EtherCAT®スレーブ機器の構成には、この専用コンフィギュレータソフトウェアを使用します。
自動的に接続構成を検出・認識。その後、定義の調整作業をグラフィカルに行えます。
EtherCAT®が初めてでも、理解のしやすいオペレーションです。
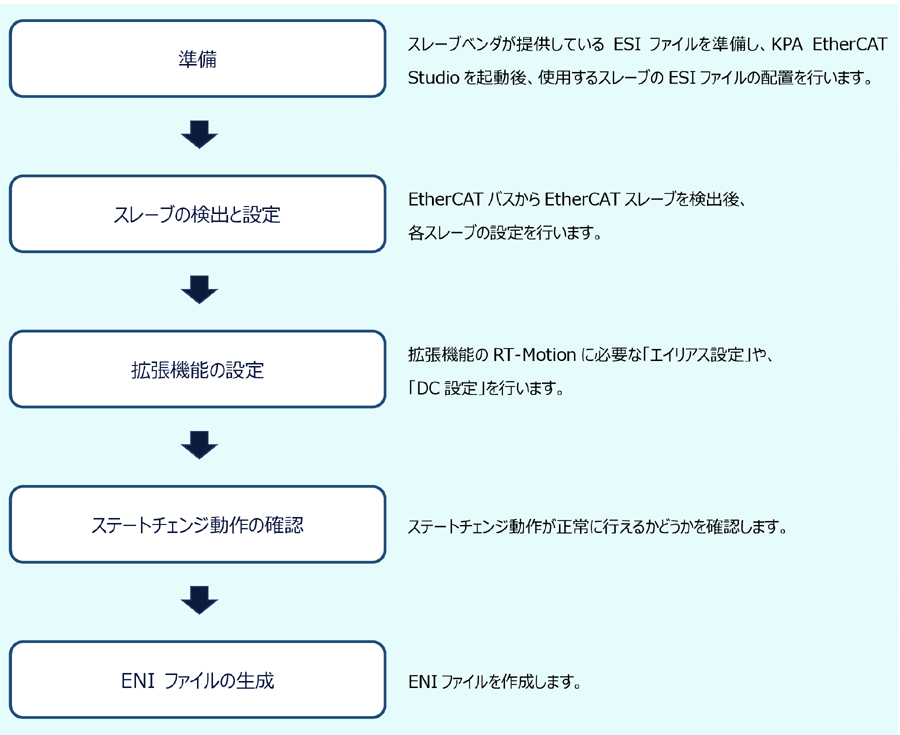
3.2.2. コンフィグレーション
基本的なコンフィグレーションの流れは以下の通りです。
操作方法の詳細は、EtherCAT StudioのCD-ROM内に収録されているEtherCAT Configurationマニュアル(EtherCAT
Configuration.pdf)を参照してください。
3.3. ENIファイルの更新
EtherCAT Studio で作成したENIファイルをコントローラに適応するにはRTC-開発キット付属のRTC設定ツール(RT-C Configuration
Tool)を使用してコントローラのENIファイルを更新します。
- 開発PCのスタートメニューのすべてのプログラムから[Micronet RT-C-SDK]>[RT-C Configuration
Tool]を選択し、対象のコントローラへ接続します。
- RT-C Configuration Toolが起動したら、「IO・FWL設定」アイコンをダブルクリックします。
- IO・FWL 設定画面の「C# ECAT Master Library」行にある[Config File]をクリックします。

- 構成ファイル選択ツールが起動しますので、先ほど作成したENIファイルを選択します。
以上で設定は完了です。「保存」をクリックすることでENIファイルがダウンロードされますが、その前に次の設定[ユニット構成の定義方法]を続けて行います。
この状態ではまだENIファイルはダウンロードされていません。
ユニット構成を変更しない場合は、保存をクリックしてダウンロードを行ってください。
3.4. RT-Motion C# サンプルプログラム
サンプルプログラムでは初期化処理から、位置決め制御(2軸)の実行を経て、終了処理を実行するまでの処理を行います。位置決めデータを、別途 Teaching 機能によって RT Motion
にダウンロードすることで、サンプルプログラムを編集することなく、様々な位置決め制御を行うことができます。
RT-MotionのRT-C言語コントローラ用サンプルプログラムのマニュアル(RT-Motion API リファレンスマニュアル)とプログラムは下記のCD-ROMに収録されています。
開発環境にプロジェクトをコピーしてご利用ください。
■ RT-Motion API リファレンスマニュアル(7章 サンプルプログラム)
[CD-ROMドライブ]:\ doc\rt-c\RT-Motion_RTC_APIReference.pdf
■ サンプルプログラム
[CD-ROMドライブ]:\sdk\sample\rt-c\RTCMotionSample\
3.4.1. システム構成図
サンプルのシステム構成は下記のようにRT-C言語コントローラにEtherCATスレーブのサーボモーター2軸を使用します。
3.4.2. サンプルプログラム説明
サンプルプログラムでは初期化処理から、位置決め制御(2軸)の実行を経て、終了処理を実行するまでの処理を行います。2軸構成であればサンプルプログラムの修正は必要ありません。
そのままコンパイルしてご利用ください。
■ 制御軸数を変更
制御軸数を変更したい場合は、サンプルプログラム中の「制御軸数」の値を変更します。
axisNum の値を1~4軸で指定してください。
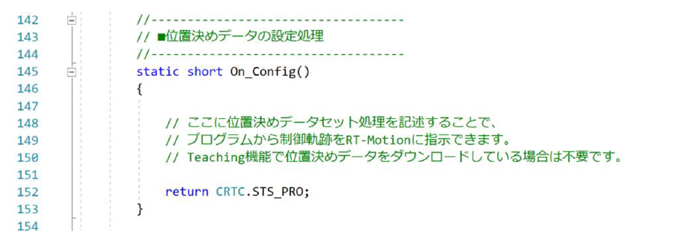
■ Teaching機能を使用しない場合
Teaching機能を使わず、プログラムから位置決めデータを指定する場合は、 On_Config() 内に、指定処理を記述します。
「RTC設定」「プログラムダウンロード」「プログラムの実行」に関しては、RTC-開発キットのCD-ROMに収録されております。
RT-C 言語コントローラ ユーザーズマニュアル(RTC_UsersManual.pdf)をご参照ください。
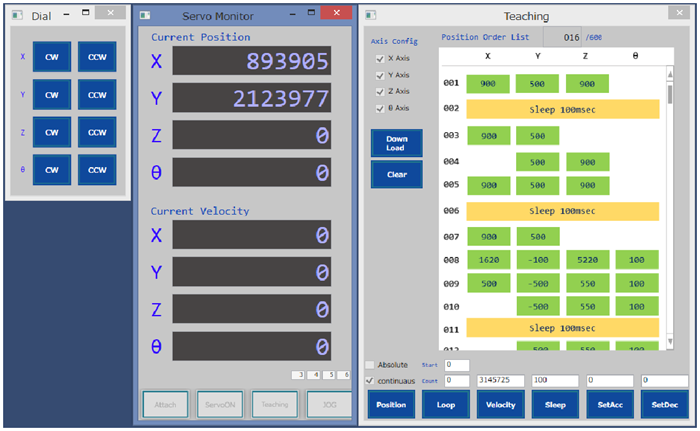
3.5. Teaching設定
サンプルプログラムでモーターを動作させるに位置情報や速さなどのTeaching設定が必要となります。
Teaching機能の使い方は下記のRT-Motion ユーザーズマニュアル(usersmanualj.pdf)の
「3章 Teaching 機能を用いた位置決め制御の実行」を参照ください。
Teaching設定画面
位置決めデータのダウンロード後、RT-C言語コントローラでプログラムの実行する事で動作が開始されます。
「プログラムの実行」に関しては、RTC-開発キットのCD-ROMに収録されております。
RT-C 言語コントローラ ユーザーズマニュアル(RTC_UsersManual.pdf)をご参照ください。