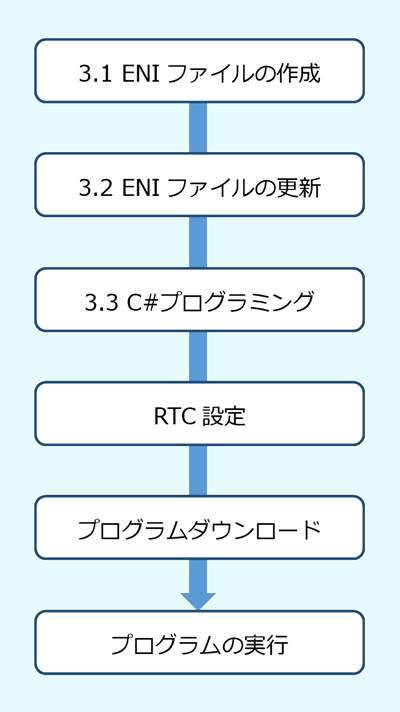
■ 3. 手順
3.1. ENI (EtherCAT Network Information)ファイルの作成
ENI(EtherCAT Network Information)ファイルの作成はEtherCAT Studio(オプション)が必要となります。
3.1.1. EtherCAT Studio(コンフィグレータソフトウェア)とは
EtherCAT®スレーブ機器の構成には、この専用コンフィギュレータソフトウェアを使用します。
自動的に接続構成を検出・認識。その後、定義の調整作業をグラフィカルに行えます。
EtherCAT®が初めてでも、理解のしやすいオペレーションです。
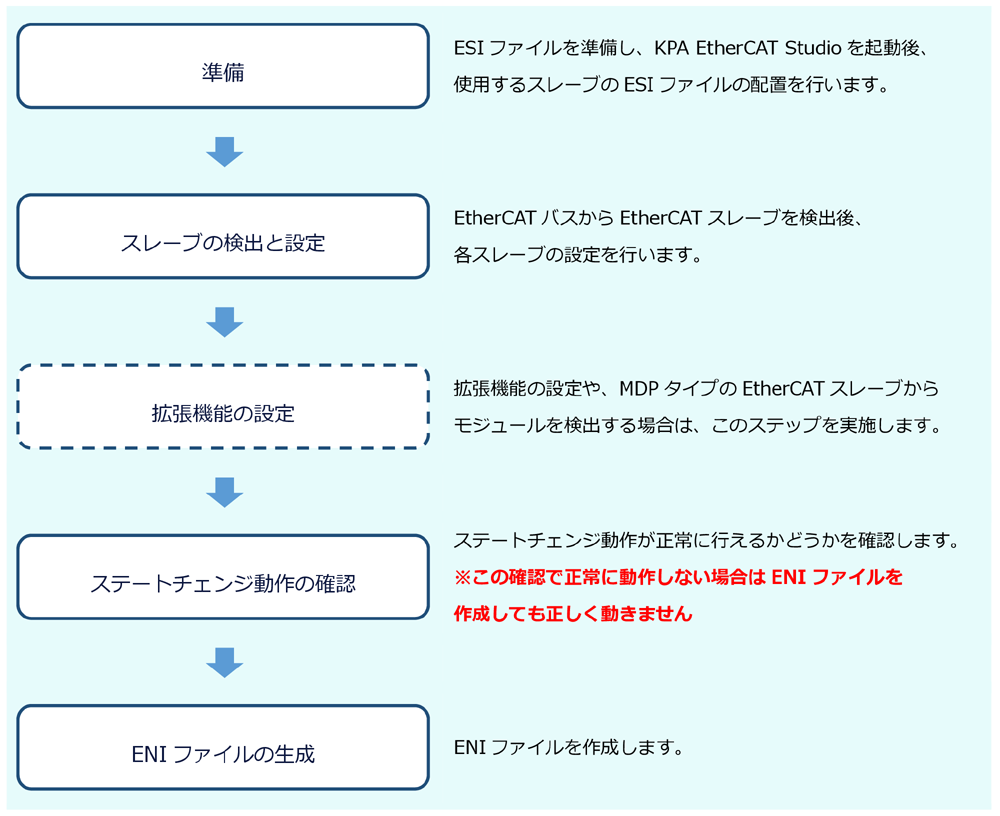
3.1.2. コンフィグレーション
基本的なコンフィグレーションの流れは以下の通りです。
操作方法の詳細は、EtherCAT StudioのCD-ROM内に収録されているEtherCAT Configurationマニュアル(EtherCAT
Configuration.pdf)を参照してください。
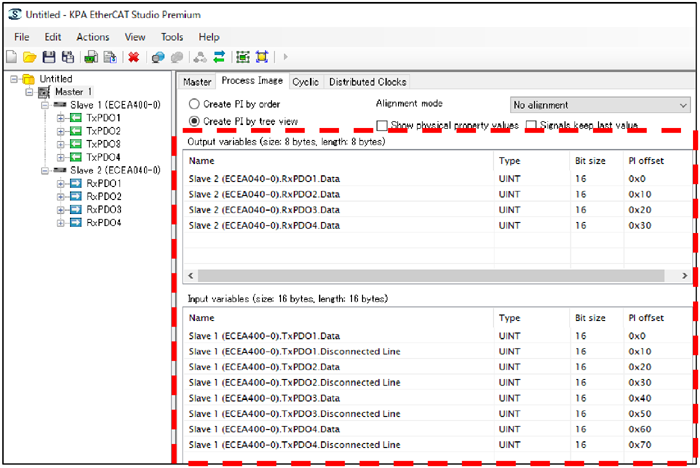
3.1.3. EtherCAT®スレーブを使用する場合に事前に必要な情報
EtherCAT®スレーブを使用した場合に必要な情報として、RSI-ECAT-Studio (EtherCAT®コンフィグレータソフトウェア)の情報が必要となります。
ENIファイル(EtherCAT Network Information)を作成した時に生成されるProcess Image情報が必要となります。
3.2. ENIファイルの更新
EtherCAT Studio で作成したENIファイルをコントローラに適応するにはRTC-開発キット付属のRTC設定ツール(RT-C Configuration
Tool)を使用してコントローラのENIファイルを更新します。
- 開発PCのスタートメニューのすべてのプログラムから[Micronet RT-C-SDK]>[RT-C Configuration
Tool]を選択し、対象のコントローラへ接続します。
- RT-C Configuration Toolが起動したら、「IO・FWL設定」アイコンをダブルクリックします。
- IO・FWL 設定画面の「C# ECAT Master Library」行にある[Config File]をクリックします。

- 構成ファイル選択ツールが起動しますので、先ほど作成したENIファイルを選択します。
以上で設定は完了です。「保存」をクリックすることでENIファイルがダウンロードされますが、その前に次の設定[ユニット構成の定義方法]を続けて行います。
この状態ではまだENIファイルはダウンロードされていません。
ユニット構成を変更しない場合は、保存をクリックしてダウンロードを行ってください。
3.3. C#プログラミング
C#プログラミングはVisual Studio + RTC-開発キットでC#言語を使用してプログラミングを行います。
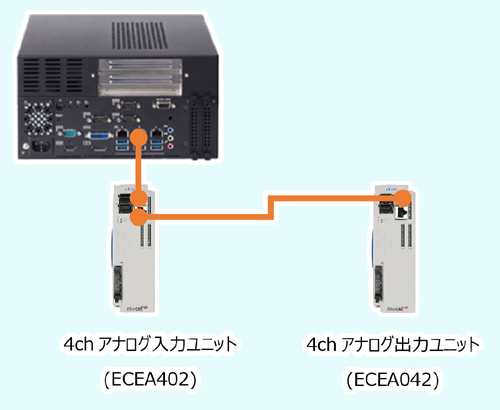
3.3.1. システム構成図
説明で使用するシステム構成は下記のようにRT-C言語コントローラにEtherCAT®スレーブの4chアナログ入力ユニット(ECEA402)と4chアナログ出力ユニット(ECEA042)を使用した例で説明します。
3.3.2. サンプルプログラム説明
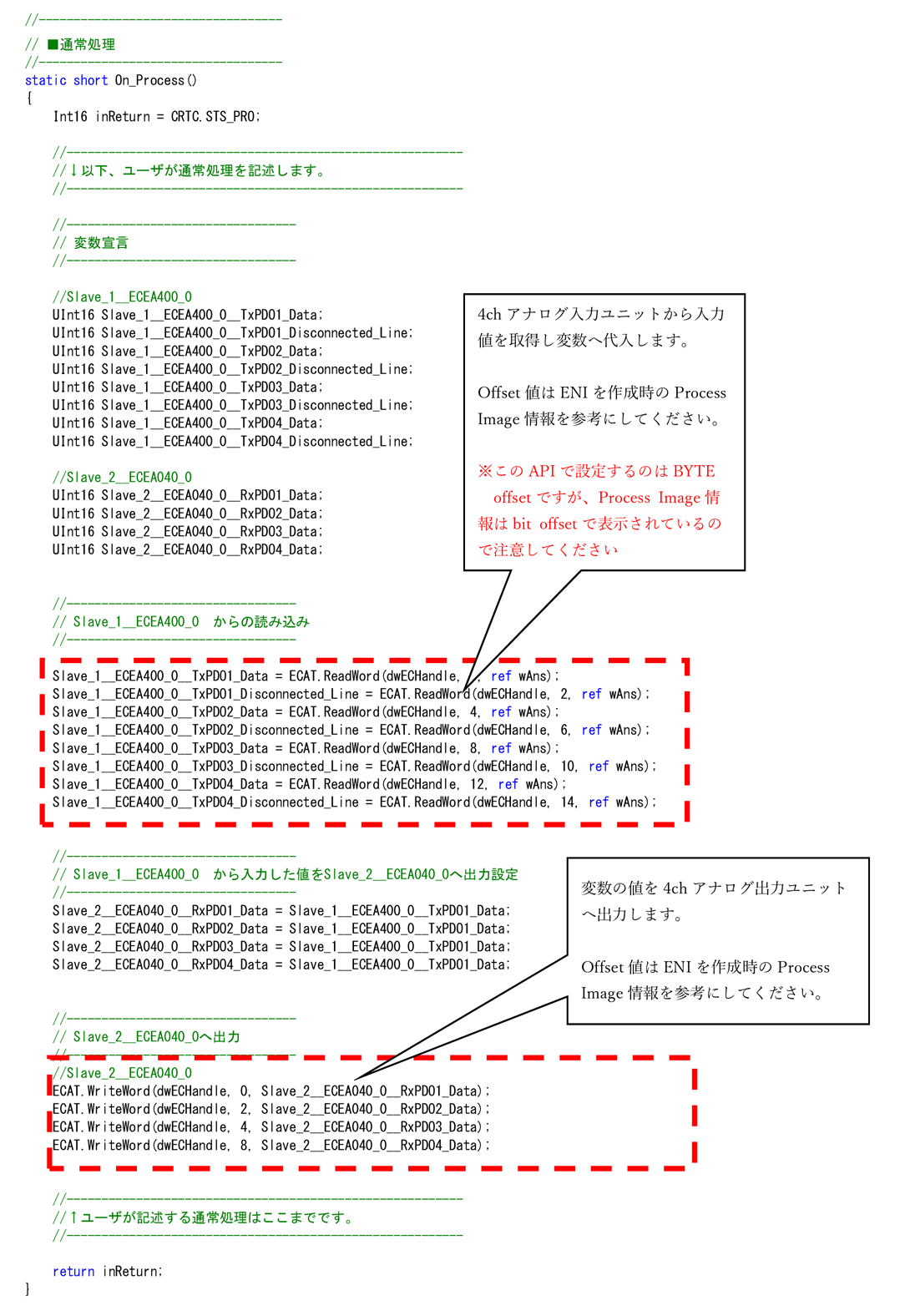
ご説明するサンプルプログラムは、RTC_Program_01を使用して4chアナログ入力ユニット(ECEA402)から入力した値を4chアナログ出力ユニット(ECEA042)から出力するサンプルプログラムです。
※サンプルプログラムはエラー処理や終了処理を省略していますのでご注意ください。ご使用の際にはエラー処理や終了処理を必ず行ってください。
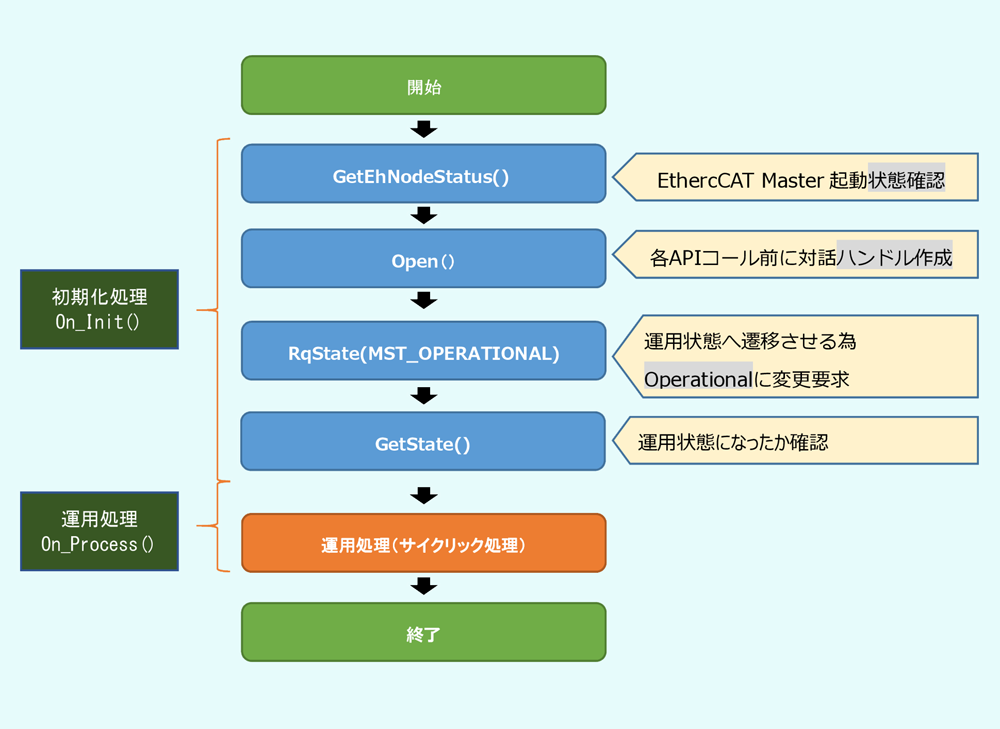
3.3.3. サンプルプログラムの流れ
下記のソースコードは
こちらからダウンロードしてください。
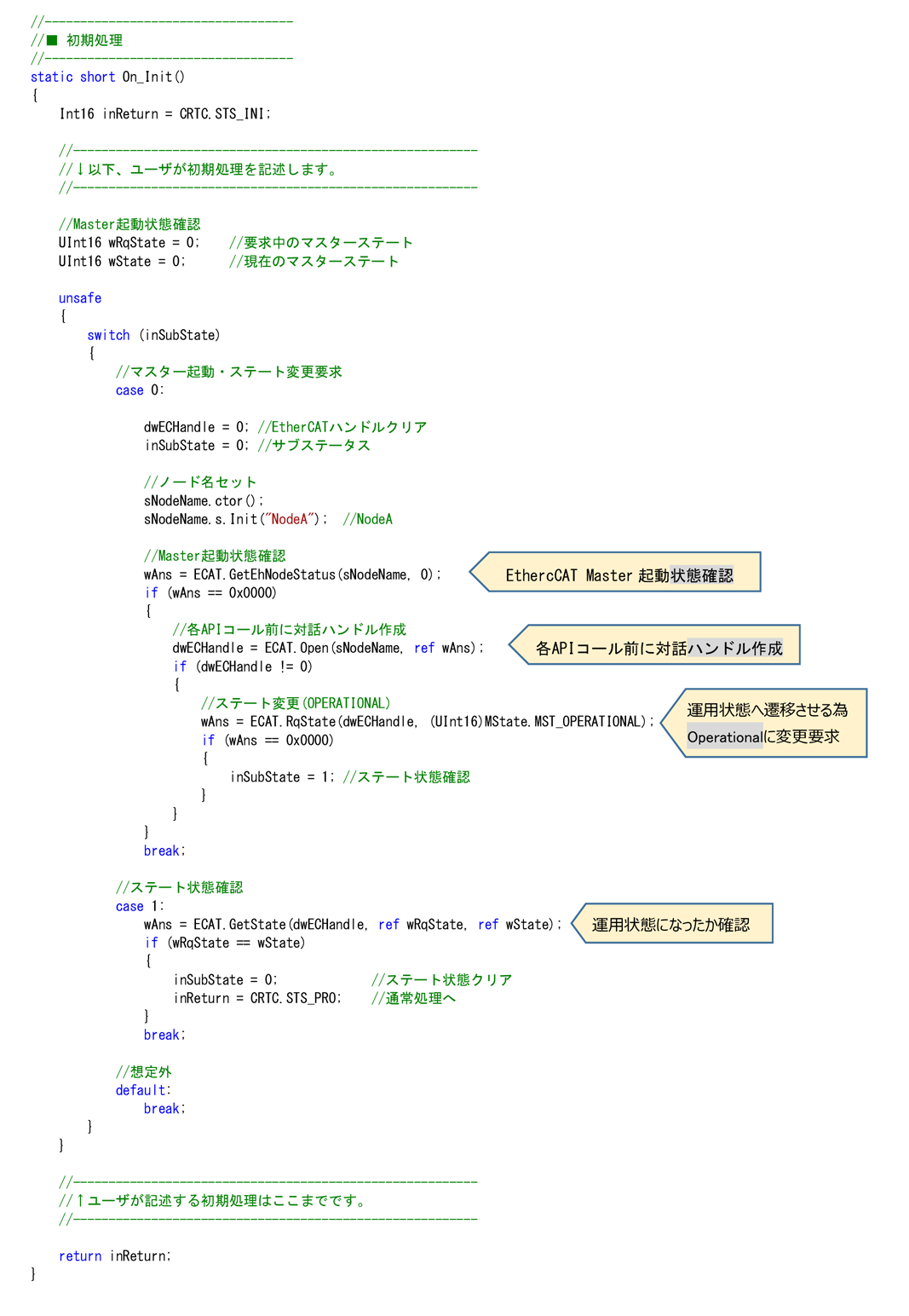
■ 初期化処理
■ 運用処理
「RTC設定」「プログラムダウンロード」「プログラムの実行」に関しては、RTC-開発キットのCD-ROMに収録されております。
RT-C 言語コントローラ ユーザーズマニュアル(RTC_UsersManual.pdf)をご参照ください。